
Team
- Faculty: Joe Davidson (OSU), Cindy Grimm (OSU), Manoj Karkee (WSU), Matthew Whiting (WSU), Stefan Lee (OSU), Sinisa Todorovic (OSU), Heather Knight (OSU)
- Graduate students: Deanna Flynn (OSU; CS), Abhinav Jain (OSU; CS), Alex You (OSU; Robotics), Martin Churuvija (WSU; Ag Biosys Eng), Nidhi Parayil (OSU; Robotics), Liqiang He (OSU; CS), Josyula Gopala Krishna (OSU; Robotics)
- Undergraduate students: Ashwin Dahal (WSU)
Objectives
- Pruning rules can be extracted from expert workers’ demonstrations and explanations.
- Modern cross-domain segmentation models trained with simulated tree images will generalize to the real orchard, reducing the time and resources required for data collection and annotation.
- Hybrid control combining force sensing and eye-in-hand visual feedback from 2D images leads to robust, accurate branch cutting.
Hypotheses
- Develop machine learning models for grape cold hardiness prediction and compare those to existing models.
- Develop and evaluate multi-task learning methods for cold hardiness of different grape cultivars.
- Adapt models developed for grapes to predict sweet cherry cold-hardiness and bud break timing.
- Develop transfer learning methods that can leverage phenology data when cold hardiness training data is not available.
- Porting relevant beta models on AgWeatherNet for grower decision support and testing by a selected set of users.
Approaches
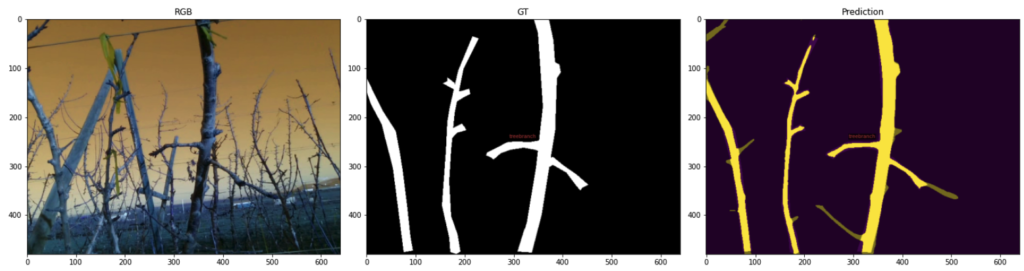
Tree-branch Semantic Segmentation
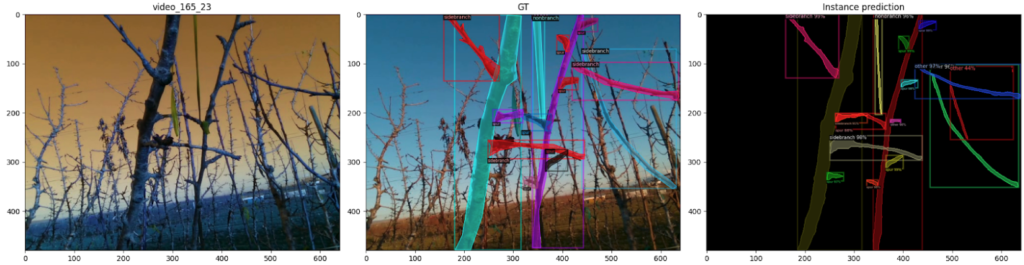
Tree-branch Instance Segmentation

Trunk-width Estimation
International Collaboration
AgAID International Collaboration with Wageningen University & Research (WUR), Netherlands


Related Publications
2023

Automatic estimation of trunk cross sectional area using deep learning Proceedings Article
In: Precision agriculture, pp. 491–498, Wageningen Academic Publishers, 2023, ISBN: 978-90-8686-393-8, (Section: 62).

Follow the leader: a path generator and controller for precision tree scanning with a robotic manipulator Proceedings Article
In: Precision agriculture, pp. 167–174, Wageningen Academic Publishers, 2023, ISBN: 978-90-8686-393-8, (Section: 19).

Bidirectional alignment for domain adaptive detection with transformers Proceedings Article
In: Proceedings of International Conference on Computer Vision, 2023.
2022

Optical flow-based branch segmentation for complex orchard environments Proceedings Article
In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 9180–9186, arXiv, 2022, (ISSN: 2153-0866).